
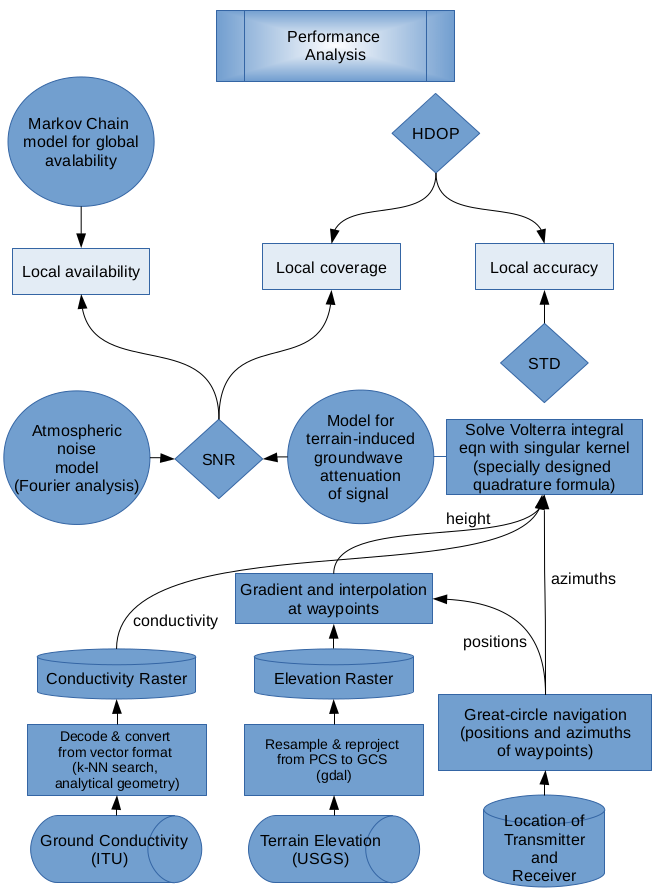
To predict performance metrics for an LF navigation system at a particular location we need to develop and combine multiple models. The Groundwave Propagation Model, computes signal attenuation due to non-uniform surface conductivity and terrain elevation along the path from transmitter to receiver. The Markov Chain model for global transmitter availability is developed next; the results can be combined with signal-to-noise ratio (SNR) to determine local transmitter availability. External noise is modeled by the in-house Atmospheric Noise Model. The results of groundwave propagation and atmospheric noise modelling are combined to determine SNR and DOP (dilution of precision) in the Coverage Prediction Model.
The deterministic model is then extended by including stochastic concepts, focusing on navigation performance metrics and pseudorange computations. We then apply both deterministic and stochastic analyses to the European continent, while tackling the deficiencies in input data for this geographical region.
Finally, we analyze a computationally efficient approach to the inverse problem: assuming we desire to optimize performance criteria, such as SNR and DOP, where should we place additional transmitters?

heterogeneous conductivity with two-section path propagation from land to sea. Curves
for different k factor, where k ≡ d 2 /(d 1 + d 2 ).