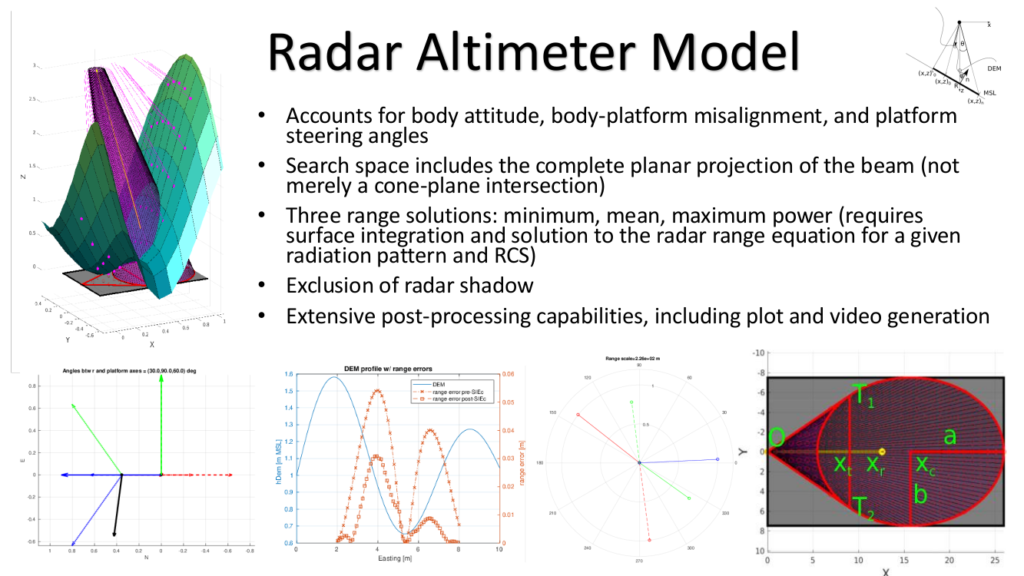
The goal of this work is to develop mathematical models for terrain-aided navigation, such as radar altimetery and phased arrays, of high accuracy and fidelity. Potential applications include helicpoter landing and low-altitude flights, including nap-of-the-earth (aka ground-hugging).